









[sc name=”ad_1″]
BSF provides a discrete simulation environment to implement and extend peer-to-peer botnets, tweak their settings and allow defenders to evaluate monitoring and countermeasures.
Synopsis
In the arms race between botmasters and defenders, the botmasters have the upper hand, as defenders have to react to actions and novel threats introduced by botmasters. The Botnet Simulation Framework (BSF) addresses this problem by leveling the playing field. It allows defenders to get ahead in the arms race by developing and evaluating new botnet monitoring techniques and countermeasures. This is crucial, as experimenting in the wild will interfere with other researchers and possibly alert botmasters.
BSF allows realistic simulation of peer-to-peer botnets to explore and study the design and impact of monitoring mechanisms and takedown attempts before being deployed in the wild. BSF is a discrete event botnet simulator that provides a set of highly configurable (and customizable) botnet features including:
- realistic churn behavior
- variable bot behavior
- monitoring mechanisms (crawlers and sensors)
- anti-monitoring mechanisms
Moreover, BSF provides an interactive visualization module to further study the outcome of a simulation. BSF is aimed at enabling researchers and defenders to study the design of the different monitoring mechanisms in the presence of anti-monitoring mechanisms [1,2,3]. Furthermore, this tool allows the users to explore and understand the impact of design choices of botnets seen to date.
Installation
BSF consists of the simulation framework and a visualization tool. The simulation framework itself is built on top of OMNeT++. Visualization is built on top of Dash to provide an interactive within your favorite browser.
Setting up OMNeT++
The current version of BSF is built and tested with OMNeT++ version 5.4.1.
Please refer to the OMNeT++ documentation for installation guidelines, tutorials and references regarding the provided functionalities.
Setting up visualization components
To visualize the botnet simulations, the following python packages are required:
pip install dash==1.2.0 # The core dash backend
pip install dash-daq==0.1.0 # DAQ components (newly open-sourced!)
pip install networkx
Getting Started
OMNeT++ simulations are based on configurations defined in .ini files. The simulations folder of this repository contains a set of pre-defined configurations located in the tests.ini and sample.ini files.
To run a configuration, you may use either the OMNeT++ IDE or the command line. As BSF does not use any of the graphical features of OMNeT++ we recommend to run all simulations in the cmdenv, i.e., using just console output.
Running Simulations within the IDE
To run a simulation within the IDE you need to setup a run configuration. For this, right click the *.ini file and select Run As -> Run Configurations. Next setup your configuration file as shown in the image below:
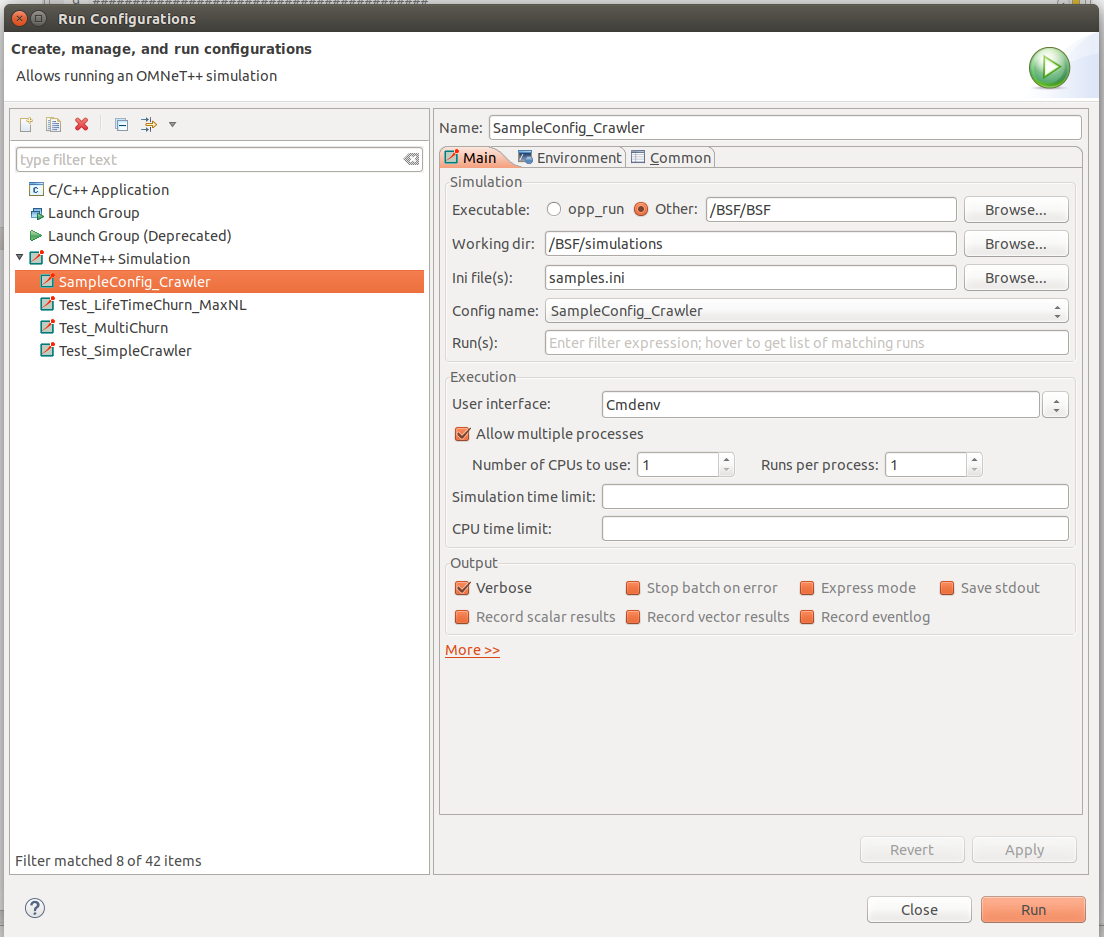
Now simply hit apply and run. The output of the simulation will appear in the IDE console.
Running Simulations from the Command Line
To run from the command line, we need to first build the project. Navigate to the root folder and run:
make MODE=release all Afterwards navigate to the simulations folder and run:
../BSF -r 0 -m -u Cmdenv -c SampleConfig_Crawler -n .. samples.iniSimulation Output
Regardless of running the simulation from the IDE or the command line, you should see output similar to this:
** Event #577792 t=64831.46985369179 Elapsed: 4.21157s (0m 04s) 37% completed (37% total)
Speed: ev/sec=180486 simsec/sec=14682 ev/simsec=12.293
Messages: created: 406512 present: 2108 in FES: 487
Just crawled: 24 nodes at 88983.25891616358
Just crawled: 40 nodes at 92583.25891616358
** Event #1050880 t=93607.74036896409 Elapsed: 6.28757s (0m 06s) 54% completed (54% total)
Speed: ev/sec=227885 simsec/sec=13861.4 ev/simsec=16.4402
Messages: created: 729732 present: 2106 in FES: 630
Just crawled: 108 nodes at 96183.25891616358
Just crawled: 286 nodes at 99783.25891616358
Just crawled: 570 nodes at 103383.25891616358The blocks start off with ** are standard outputs of OMNeT++ indicating the progress and statistics of the simulation. In the selected configuration, we have additional outputs by the crawler reporting the number of nodes discovered at each crawling interval. While this doesn’t tell us much, we will show in the next section how you can visualize the output of both the botnet and the results of the crawler.
Visualizing Results
The visualization is decoupled from the simulation framework and works on top of the generated graph and monitoring log files. We have also uploaded some sample data to explore the visualizations without running the main framework.
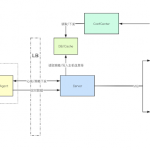
To visualize the results of the simulations you have to navigate to the visualization folder and call app.py. Afterwards open your favorite browser and open http://127.0.0.1:8050/. This should provide you with a graph view of one of the sample configurations looking something like this:
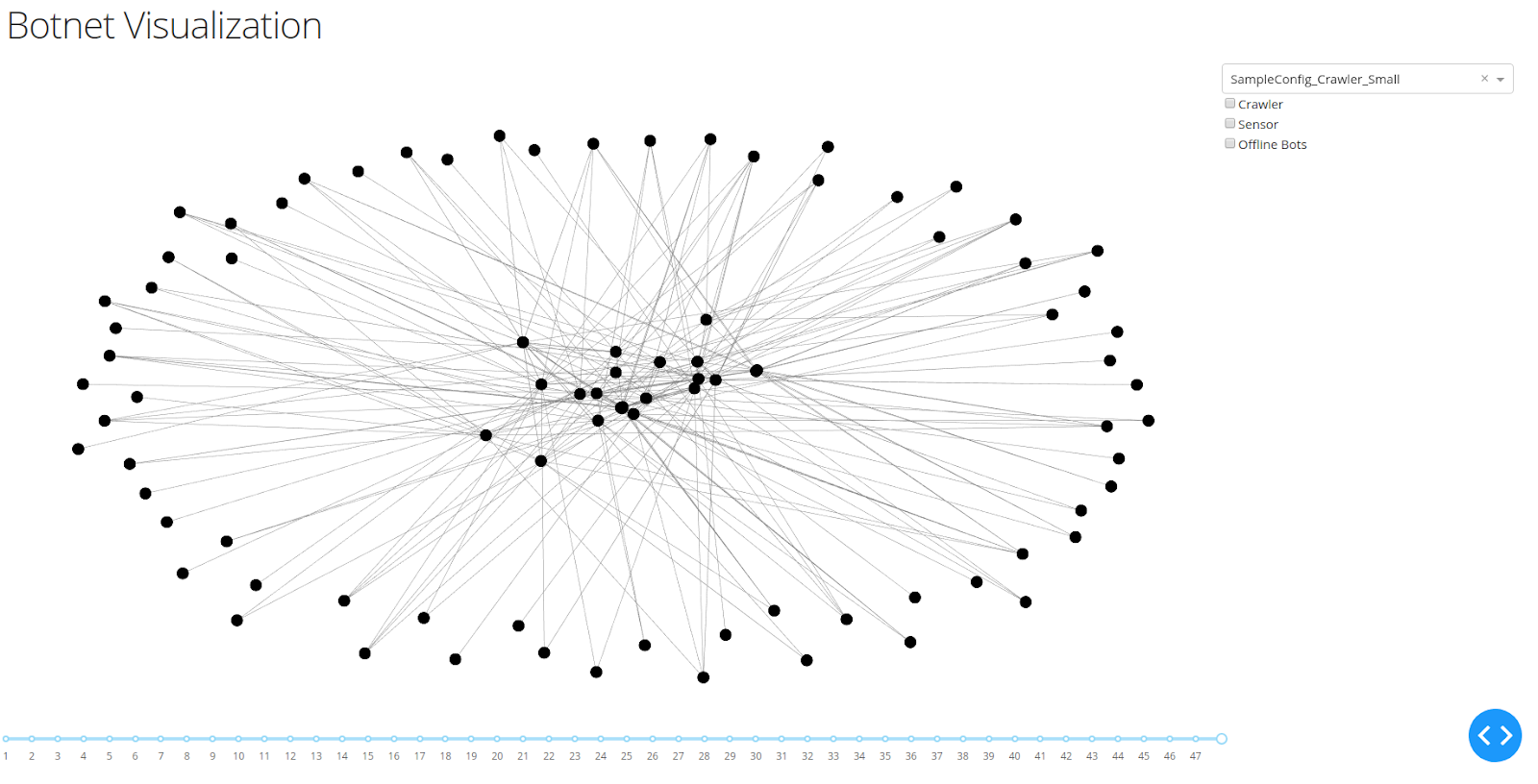
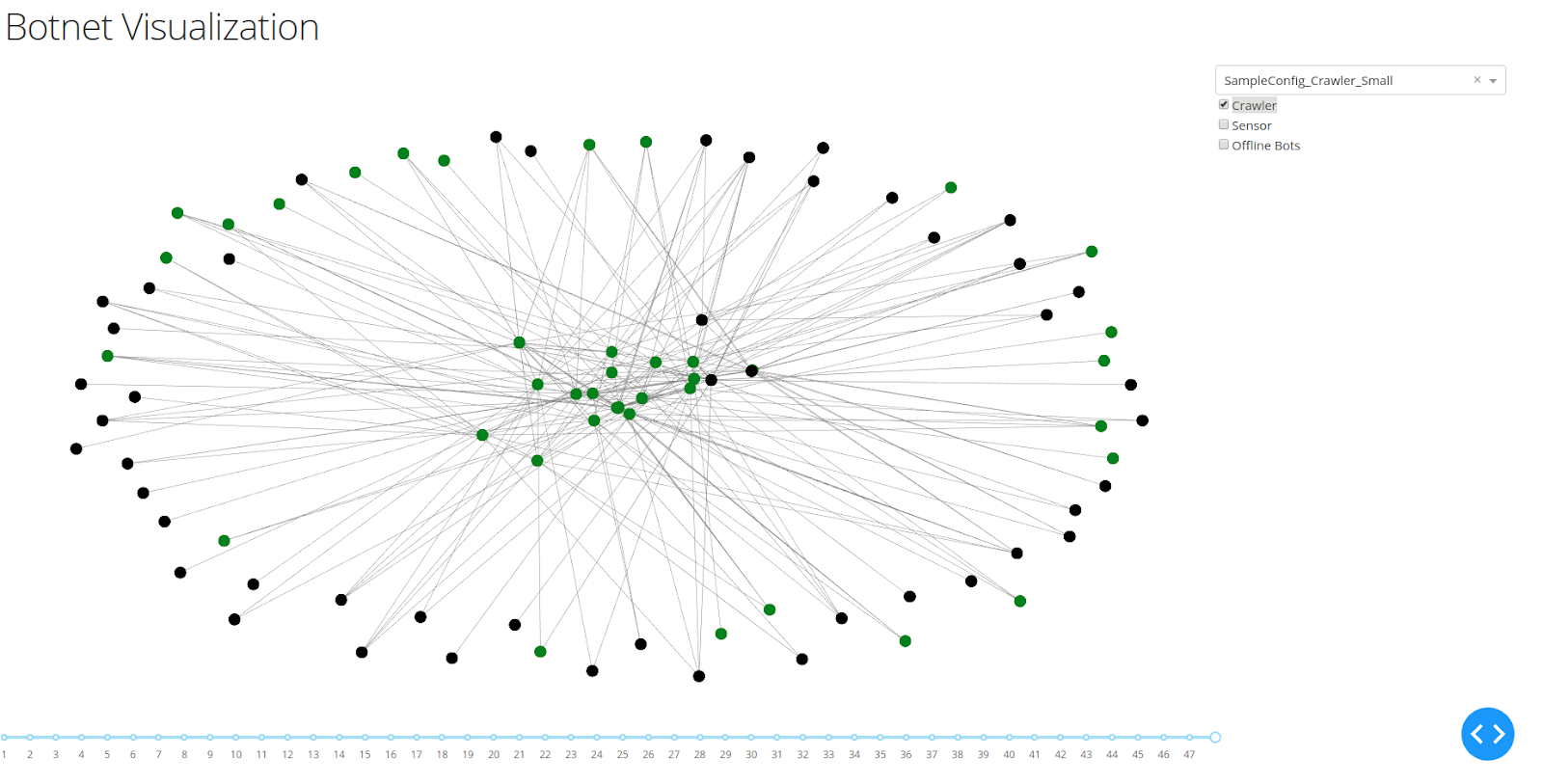
The dropdown menu in the top right of the screen allows you to choose between the results of different configurations. On the bottom of the screen you can see a timeline indicating all available snapshots of the botnet. This allows to visualize changes in the activity and connectivity of the bots. Furthermore, the menu on the right allows to visualize the information collected by crawlers or sensors. An example can be seen in the following figure, where the view of the crawler is highlighted in green.
Furthermore, we are currently working on more advanced visualizations aiding the analysis of monitoring and takedown operations.
References
The following publications present examples on the use cases of BSF:
[1] Leon Böck, Emmanouil Vasilomanolakis, Jan Helge Wolf, Max Mühlhäuser: Autonomously detecting sensors in fully distributed botnets. Computers & Security 83: 1-13 (2019)
[2] Leon Böck, Emmanouil Vasilomanolakis, Max Mühlhäuser, Shankar Karuppayah: Next Generation P2P Botnets: Monitoring Under Adverse Conditions. RAID 2018: 511-531
[3] Emmanouil Vasilomanolakis, Max Mühlhäuser, Jan Helge Wolf, Leon Böck, Shankar Karuppayah
[sc name=”ad-in-article”]

Add Comment